KubeROS
As the ROS and ROS 2 simplify and accelerate the development of your robots based on the OS (Linux).
KubeROS aims to make the deployment of ROS 2 applications simple, secure, and scalable,
across the onboard devices, the edge, and the cloud, based on the Cloud OS (Kubernetes).
Challenges in real robotic applications

Demand for Computing Power
The robot's onboard computing resources are often inadequate due to battery and space constraints. Once it's built, it is impratical to upgrade the hardware to meet increased demand.

Complexity of Software
Ranging from low-level controllers for actuators to high-level modules for sensing, planning and action, the creation of an intelligent robot involves ever-growing software size and complexity.

Large-Scale Deployment
Numerous scenarios call for a large fleet of robots to handle the increased workload. As roboticists, we anticipate a future where more robots can be rapidly developed and deployed in production.
KubeROS is built on top of Kubernetes and fully supports ROS 2. It provides roboticists with an easy-to-use interface to deploy their software and take advantage of the edge and the cloud computing.
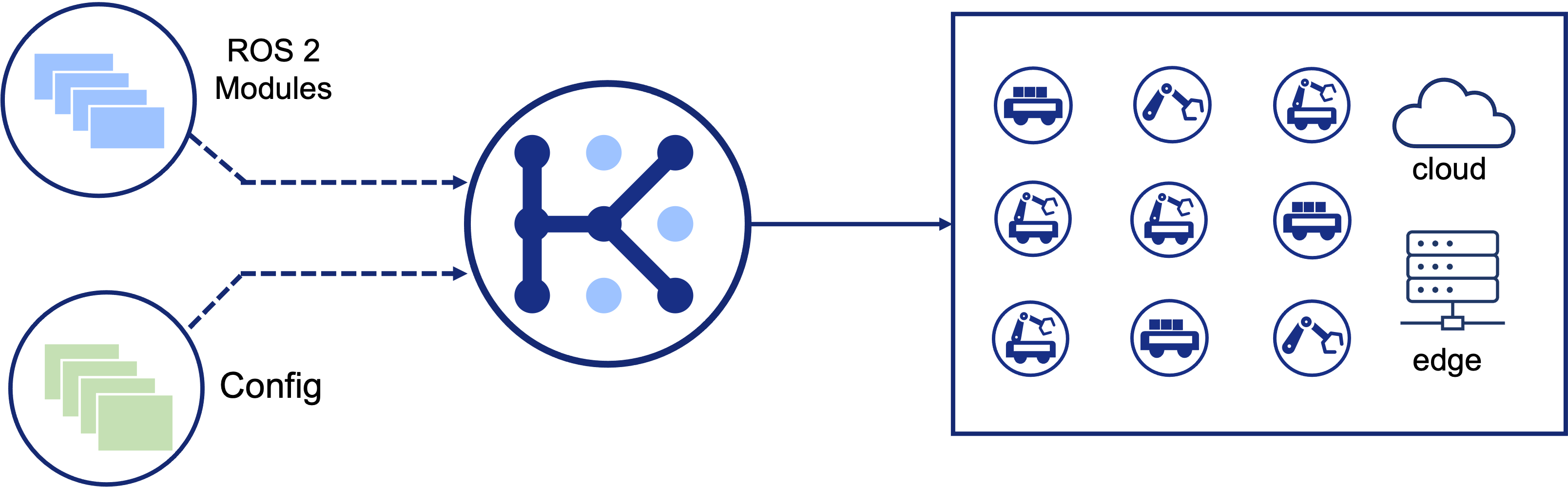
Containerized ROS 2 Modules
The smallest deployable unit in KubeROS is a ROS 2 module. It contains multiple cohesive ROS 2 packages to perform a specific task. Several of these modules together form the foundation of a complete robotic application.
Automated Deployment
Based on the deployment configuration and the system state, KubeROS deploys the ros 2 modules across the entire fleet, to enhance the overall performance and optimize resource utilization within the system.
Unified Computing Infrastructure
Roboticists needn't to care where and how to get the computing resources. KubeROS manages all resources and offers developers an interface for deployment and an interface for system administrators to configure them.
Key Features

Native ROS 2 Support
Focus on your tasks and get access to the edge and the cloud without modifying existing code.

Edge Centric Deployment
Main cluster is located in the edge side and can be used in an isolated local network.

Cloud and Edge Computing
Use the edge for latency-sensitive tasks and use the cloud for massive compute-intensive tasks.

Security First
Communication between the local network and the cloud is secured by the VPN tunnel and gRPC.

Heterogeneous Robot Fleet
Support flexible deployment across multiple robot fleets, even with diffrent robot types.

Vertical and Horizontal Scaling
Scale the fleet size for changing workloads and scale the software for performance and efficiency.

GPU Resources for Large AI Models
Run the inference of large AI models at the edge or in the cloud for better results.

Easy to Use
Deploy with a short deployment description with the Command Line Tool (CLI)

Open Source
Open source under Apache License, version 2.0, as ROS 2 and Kubernetes